气压传动是以空气为能源介质来实现各种机械的传动和控制。其优点是:工作介质来源广泛,工作处理之后不会污染环境;传动动作迅速、反应快、维护简单;工作环境适用性强;传动过程阻力小,可用于远距离传送;成本低,过载后能自我保护。
大家都知道,气压工作压力取决于负载,与流入的流体多少无关;运动速度取决于进入气压缸的流量,与流体压力无关;气压传动是以流体的压力能来传递动力的。
今天,我就浅谈一下气压的实际用法-真空吸盘设计选型。
先认识一下真空吸盘,了解一下结构。

真空吸盘机械手总体设计
㈠真空吸盘机械手的主要技术参数
设计一套真空吸盘机械手,外形采用圆柱形,功能先进,动作可靠,安全经济,满足生产要求,具体参数见下表:
主要技术参数:
吸盘吸持力 | 2kg |
运动轨迹形式 | 圆柱坐标系统 |
手臂伸缩行程 | 0-350mm |
手臂升降行程 | 0-280mm |
手臂回转行程 | 0-180度 |
定位方式 | 定位块 |
控制方式 | PLC+定位控制 |
驱动方式 | 气压传动系统 |
自由度 | 3 |
㈡真空吸盘机械手的动作原理及工艺方案

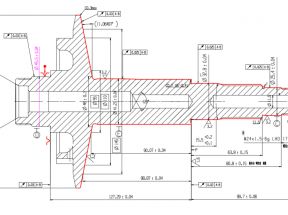
㈢真空吸盘机械手动力学分析及吸盘选型
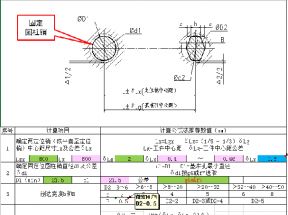
本设计中,工件平放,因此先在水平方向上对吸盘进行分析,如图

为确保吸盘有足够的吸持力吸取工件,依据实践,给予一个安全系数μ=2.5,
吸力=S*P/μ
其中:S--吸盘面积(cm2),P 为气压(kg/cm2),μ为安全系数>=2.5
吸盘直径、吸持面积、提升力参数表

考虑到吸附尺寸,吸附时吸盘变形,可将吸盘尺寸放大10%左右
依据上表,计算查的40mm即可满足。
今天只吸盘的设计选型,不谈整体结构,有时间下次在谈。