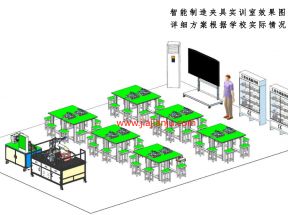
序号 | 名称 | 描述 | 数量 | 备注 |
1 | 智能制造自动化夹具操 作机台 | 主体有型材构成,表面喷塑/烤漆 | 1 | 夹研自制 |
2 | 机器人控制系统 | 用于驱动机器人可编程控制系统 | 1 | 夹研自制 |
3 | 六轴机器人 | 大臂展工业机器人 | 1 | 标准品 |
4 | 机械手自动抓持夹具 | 多种形状产品的抓持夹具 | 2 | 夹研自制 |
5 | 机器人识别系统 | 配置工业相机以及RFID标签 | 3 | 夹研自制 |
6 | 托盘交换系统 | 演示FMS夹具托盘交换 | 1 | 夹研自制 |
7 | 夹具交换托盘 | 模拟机械人抓取动作 | 1 | 夹研自制 |
8 | 夹具检测系统 | 利用传感器检测夹具工作并反馈 | 1 | 夹研自制 |
二、主要教学内容
建成能适应产业需求和满足学生培养目标的自动化机器人夹具 实训系统。
1、从工装夹具方向选型工业机器人的思路和方法
2、工业机器人的抓持夹具设计思路与设计方法
3、自动化夹具设计思路和方法
4、自动化夹具检测元件选用方法和设计思路