传感器外壳/五金管/传感器五金配件加工车床机械手, 车床上下料机械手是拿铁智能为传感器五金配件车床加工厂商设计的传感器外壳/五金管/传感器五金配件加工车床上下料机械手。
传感器外壳/五金管/传感器五金配件加工车床机械手介绍
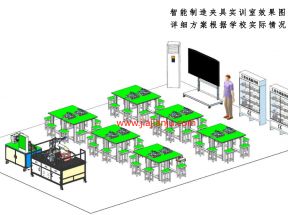
传感器外壳/五金管/传感器五金配件加工车床机械手自动上下料系统
料仓:根据 加工件的特点,本实例采用1轴伺服电机驱动点阵式料仓,料仓上放置卡式料盘,采取定位销方式定位。料盘:可放置毛坯件约200个,可连续加工约1小时。(如采用多层料仓,储料量更大,可实现一个班自动化生产而无需放料和收料)工作原理:料仓底部安装伺服电机1套。机械手臂每次从料仓上取走一个毛坯件,然后放回一个成品件,直至加工完当排毛坯件后,伺服电机驱动料盘往前行程一定距离,将后面一排毛坯件移至机械手臂的取件位置。如此重复,直至加工完整盘毛坯件后,重新放置新的毛坯件即可。点阵式料仓采用伺服电机精准定位,稳定性优,使用更简便。
传感器外壳/五金管/传感器五金配件加工车床机械手抓手设计特点手臂抓手:每套机械臂均安装一套可180度旋转的气动转缸与2套机械手指(卡爪),其中一套卡爪负责将已加工好的工件取下,然后气动转缸旋转180度,另一套卡爪负责将待加工工件精准安装在车床的主轴夹具上。手臂带自动吹屑装置,车床上的完工件被取下后,吹屑装置会自动吹屑,直至吹干净为止。
传感器外壳/五金管/传感器五金配件加工车床机械手动作流程说明
机械手从料仓取出毛坯件送至1号车床内→ 机械手臂将1号车床内的完工件取下并启动旋转气缸旋转180度→机械手臂自带的吹屑装置将车床主轴内外的铁屑吹干净→机械手臂将毛坯件装入车床主轴内 →机械手臂退出1号车床并把完工件下料到料仓成品工位,机械手又从料仓取出毛坯件重复着同样的动作给2号机床上下料;从而完成了一个工作流程。然后机械手马上进入下一个自动生产流程,直至把料仓上的所有毛坯件加工完毕为止。
机械手控制系统根据数控车床的加工节拍、装夹时间等因素,设置机械手最优运行规则及各种安全保护装置,以保障机械手安全、稳定的运行。
机械手动作时间节拍介绍
车床加工缠屑清理/高压风枪特点
高压去屑:将切削液的压力增大,高压水将条形屑从刀柄或主轴上清除!(选配)
机械手主要配置列表
机械手控制系统
控制系统:采用新代高端智能伺服控制系统,总线型伺服电机驱动,令机械手运行更加快速、平稳,确保高效高精度上下料与 装夹。控制系统带以太网接口,可方便连接生产管理系统,实现远程在线生产监控与远程维护。
本控制系统与PLC比较,通讯速度更快,精度更高,系统更加稳定。示意图如下:
传感器外壳/五金管/传感器五金配件加工车床机械手实例图片